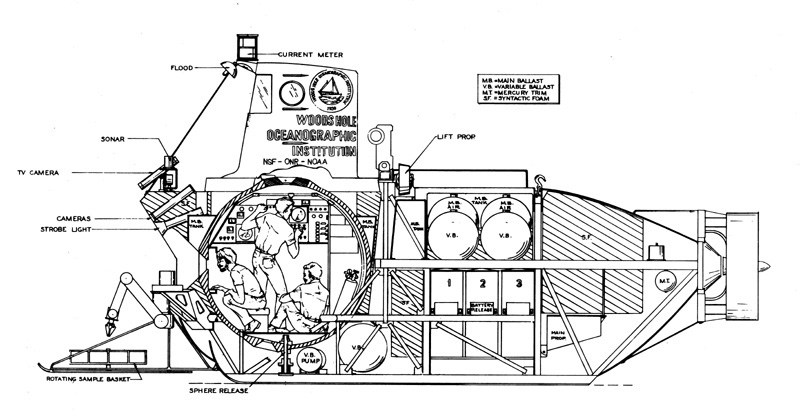
Alvin has a long and venerable history as the original yellow submarine. It explored the Mid Atlantic Ridge in the 1960's, revolutionizing geology by validating the theory of continental drift, and carried humans for the first time to the sunken Titanic. It has been featured often in the National Geographic Magazine and in television programs about deep sea exploration.
EDITOR'S NOTE: The following article is based on research and development at the Woods Hole Oceanographic Institution (WHOI) of the Alvin / Atlantis II Data System by John Akens and the author, with technical assistance from George Meier.
This issue of Oceanus is devoted to the nature of hot vents and cold seeps. There, as elsewhere, the limits of exploration are, largely, the limits of the tools at hand. The deep submersible Alvin allows each scientist to glimpse the ocean floor through his porthole, record it on film and video, and collect samples to be brought to the surface. Meanwhile, Alvin's electronic senses are recorded and displayeti inside by Alvin on board computer system.
From the beginning of science, humans have built tools to supplement their abilities to perceive and to remember. Long before he helped build the submarine that bears his name, Allyn Vine, Scientist Emeritus at WHOI, learned the following song from his teacher, Maurice Ewing.
We sailed the ocean blue,
We searched the ocean bottom,
We learned a fact or two,
Then promptly we forgot'em.
Alvin, now 20 years old (as of this article, in 1984), cannot send data to the surface. So, in addition to three human occupants, the submersible carries six small interconnected RCA computers to help interpret and remember data. Computers have two great advantages over humans: they don't experience sensory overload, and they don't (normally) suffer memory lapses. Though Alvin only has six computers in its network right now, with further miniaturization the number could be expanded.
The Serial Data Stream
Before computers were installed aboard Alvin, a beautifully simple way of tying equipment together with a minimum number of wires was used. It was called the "Serial Data Stream." Basically, it consisted of a "shift register." A shift register is apiece of computer hardware that works something like a row of buckets. You can drop data in these digital buckets, and then dump them repeatedly, each into the next. This causes the data to "flow" down the stream. At the end of the stream, you can read the data as it comes out.
Starting with this framework in 1981, we inserted along the stream two types of computers: Listeners and Collectors. Collectors put the data on the stream; Listeners take it off. The Collector puts its data on the Serial Data Stream, and passes all the data through from any upstream Collectors. Once every second, the whole concatenated string of data appears at the downstream end of the Serial Data Stream. At the mouth of the stream, the Listeners sit like freighters, ready to ship the data off in some other format, such as floppy diskettes, recorded audio, or numbers and graphs overlaid on film and video. These computers are called "Listeners," because they do nothing to alter the originaJ body of raw data, but simply process the data for display or storage. Although the Listeners can store data on audiotape, video tape, and even photographic film, it is the 9iskettes that preserve the entire data stream, and allow it to be recreated. We called this concept "unimedium."
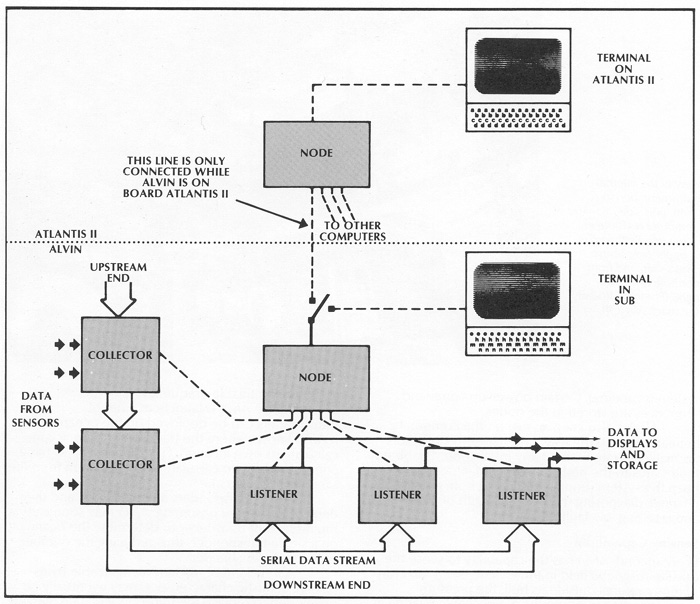
The three kinds of Alvin's onboard computers, Collectors, Listeners, and Nodes, are tied together by two distinct networks. Collectors and Listeners share data on the Serial Data Stream, while Nodes tie them together into a Communications Network (dashed line).
A third kind of computer, the Node, was needed to tie all the computers together to a person at a terminal. Nodes form a separate network from the Serial Data Stream. The Node's communication network is shaped like a tree, with the standard person-to-computer interface (keyboard and screen) at the root of the tree. The Nodes can be connected at many levels. Nodes themselves are reached just like any other computer, or they may be "transparent" to allow the person to talk through to one of the computers beyond. When Alvin is on board its new mother ship, Atlantis II, a Node in what is known as the Top Lab is connected, allowing access to all Alvin's computers.
In Alvin, it is necessary to have a single-switch operation (that is, when the power comes up, the system is running). Certain power-up command sequences are stored in the nodes. Nodes also keep an eye on the computers beneath them in the tree. Listeners and Collectors normally operate without any instruction, ublabbing" their status to the node above them. Nodes serve to keep the system running, switching from channel to channel, diagnosing the general health of the system, and resetting any faulty computer.
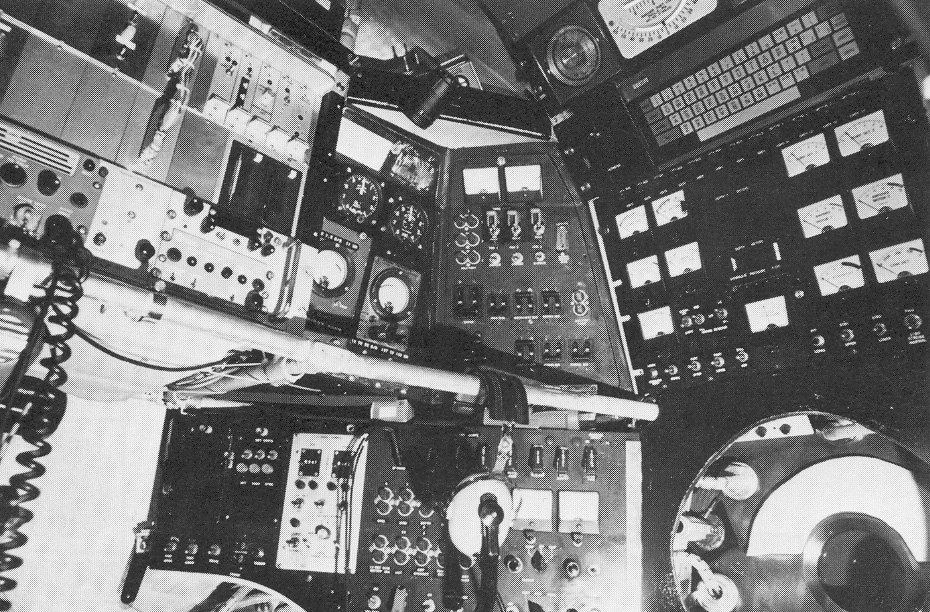
View of the internal instrumentation in Alvin, port side. Computer is visible in upper left. Keyboard is in upper right above pilot's seat, and front porthole is in lower right. (Photo by Rodney Catanach, WHOI)
Sensing Capabilities
Every second, Alvin has the capability to sense the outside magnetic field in three dimensions, an array of temperatures outside its hull, the pressure (corresponding to its depth), a gyroscopic bearing in the horizontal plane, the altitude off the bottom, the propellor speed, the rudder position, transmissivity of light through the water, the speed of a free- spinning propellor (to measure water speed), the oxygen and carbon dioxide concentrations inside, the voltage and current of its power supplies, the temperature and pressure of its ballast system, the pressure of its compressed air and hydraulic system, and anything else the next scientist might want to record. All of Alvin's sensors are not always hooked up. The number of instruments it can bear at once is limited by their bulky and heavy pressure housings. From the computer system's point of view, however, adding one more piece of data is very simple, requiring no change other than plugging it in at the upstream end.
Alvin's sense of position is now evolving. Simultaneous navigation data increases the usefulness of other data, and allows for map making. Besides altitude (off the bottom) and depth (from the surface), the sub can measure the time it takes sound to get to a Utransponder" and back, and so determine the distance to the transponder. A transponder is apiece of equipment that listens for a beep on one frequency, and then responds on another, identifiable, frequency. Before Alvin is launched, a net of transponders can be deployed on the ocean bottom. If Alvin knows where the transponders are, it can calculate its own location. (The Atlantis II also has a computer that can calculate Alvin's location from the same transponders.) These transponders are expensive, and their deployment time-consuming. Alvin may soon carry a multi-element transducer to determine the bearing on a single transponder, thus reducing the number of transponders needed. A new kind of marker, recognizable by its passive acoustic characteristics, may eventually be developed to replace the transponder. Such markers would be cheap and need no power, thus allowing permanent deployment, but Alvin's sonar capabilities would have to be enhanced to recognize these markers.
Alvin's power source is batteries, and although much of the computer system is very economical in its use of this energy, certain parts still consume an appreciable amount. Problems, mostly in the power supplies and the interface with equipment, have sometimes halted the data system entirely. The computers have no vital functions on Alvin. They do not control its limbs, ballast, or propulsion. This is left to the human pilots with somewhat old-fashioned, but simple and reliable, switches. Undoubtedly, robotics is just down the road (see page 14). However, the evolution of underwater vehicles, both manned and unmanned, is only a few generations past Adam and Eve.
George D. Stetten was a Research Assistant in the Ocean Engineering Department of the Woods Hole Oceanographic Institution.
"Keeping the Ocean Bed Free From The Arms Race" letter to The Boston Globe July 31, 1986.
"Triumphant Mission," The Falmouth Enterprise , Deep Submersible Alvin mission to find Titanic, July 25, 1986.
"A Far Cry Apart," Woods Hole Weekly, Woods Hole Oceanographic and the Nuclear Arms Industry, March 29, 1984.